

RADIO CONTROL
Por Joaquín Solana XE1YJS.
Un poco de historia y bla, bla, bla.......
El sistema de radio control, control remoto o mando a distancia, data de varias décadas atrás, primeramente con la aparición de deficientes y pesados equipos de uno o dos canales (algunos de bulbos) que operaban con pulsos, no eran proporcionales, es decir, tenía el canal tres puntos básicos, centrado, derecha e izquierda.
Eran de deficiente tecnología, grandes y pesados con larguísimas antenas con resonador y de muy escaso alcance, poco confiables, además de que funcionaban en AM y por lo tanto altamente susceptibles de captar cualquier tipo de interferencias. Hoy en día la cosa es completamente diferente.
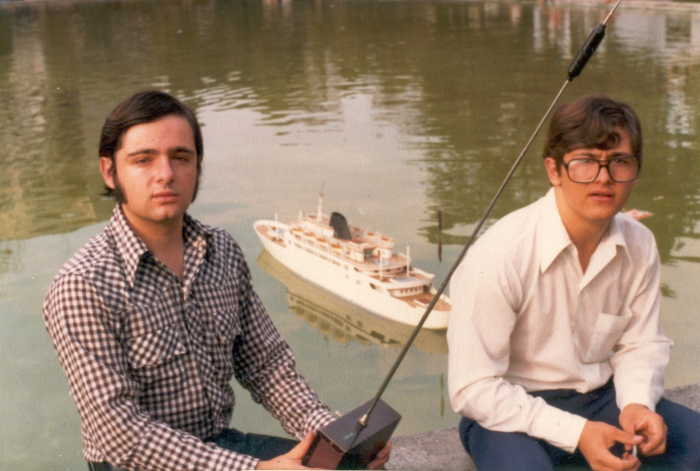
La primera vez que tuve en mis manos un control remoto o radio control, fue en el año de 1976; época en la que como muchos saben en México era IMPOSIBLE conseguir un equipo nuevo y si se conseguía, era a un precio muy alto; así es que para habilitar el barco HISPANIA, no me quedó otra alternativa mas que comprar uno usado y ya de algunos años atrás. Ese equipo aún lo conservo y es como se dice UNA RELIQUIA, pues fue uno de los equipos precursores de los modernos. Podría decir que fue el BUGATTI de los radio controles. Este es un equipo ORBIT de 7 canales y digo es, por que aún funciona. Radio con unos servos muy grandes ya proporcionales semejantes en tamaño a los que hoy se conocen como de 1/4 de escala, que en ese tiempo eran de tamaño CHICO, pues los había mucho más grandotes y con muchos cables; seis para ser más precisos.

 Desde luego este equipo opera en la banda de 11 metros
AM en 26.965 Khz. frecuencia que se ubica en canal 1 de la Banda Civil; o sea
que ya se imaginarán la cantidad de interferencia que recibía, por lo que
finalmente se le instaló un cristal especial por debajo de los canales comunes
de CB, aunque de todos modos entraba en el segmento que LOS PIRATAS de la
banda de 11 metros, mismo que usan lo que se conoce como CANALES BAJOS.
Bueno, el HISPANIA siempre usó este equipo hasta que quedó fuera de
circulación por el año de 1978-79, que fue cuando botamos el
CID CAMPEADOR,
que inicialmente llevaba un equipo más moderno y que era fácil encontrar en
aviones y barcos de esa época; un EK LOGICTROL" Champion" de 3 canales, mismo que para
variar dio mucha guerra, pues además tenía servos lineales de muy poco viaje, desde luego aquellos equipos no eran como los hoy, que nunca se descomponen
y que tienen una confiabilidad y alcance formidable.
Desde luego este equipo opera en la banda de 11 metros
AM en 26.965 Khz. frecuencia que se ubica en canal 1 de la Banda Civil; o sea
que ya se imaginarán la cantidad de interferencia que recibía, por lo que
finalmente se le instaló un cristal especial por debajo de los canales comunes
de CB, aunque de todos modos entraba en el segmento que LOS PIRATAS de la
banda de 11 metros, mismo que usan lo que se conoce como CANALES BAJOS.
Bueno, el HISPANIA siempre usó este equipo hasta que quedó fuera de
circulación por el año de 1978-79, que fue cuando botamos el
CID CAMPEADOR,
que inicialmente llevaba un equipo más moderno y que era fácil encontrar en
aviones y barcos de esa época; un EK LOGICTROL" Champion" de 3 canales, mismo que para
variar dio mucha guerra, pues además tenía servos lineales de muy poco viaje, desde luego aquellos equipos no eran como los hoy, que nunca se descomponen
y que tienen una confiabilidad y alcance formidable.

El Cid Campeador en su restauración en 2003-2004, se le instaló un equipo nuevo, marca FUTABA con variador de velocidad electrónico, aditamento que tampoco se podía encontrar en aquellos años, pues comunmente los reóstatos o variadores de voltaje eran simplemente una resistencia variable, que como es común generan excesivo calor y tienen la característica de consumir mucha corriente, lo que hacía que las baterías que en ese tiempo eran de motocicleta de unos 4 amp. (con electrolíto), se bajaran en un instante. Los primeros reóstatos electrónicos los ví en el año de 1981 y un poco más tarde Kyosho implementó algunos modelos para coches sin reversa. Esta tecnología verdaderamente ha avanzado mucho en los últimos años. Hoy en día el SPEED CONTROL o variador electrónico de velocidad, suple al servo, ya que maneja marcha hacia adelante y hacia atrás, con velocidad variable y con un mínimo de consumo de energía.
Mi tercer equipo fue un CANNON de 4 canales, excelente radio con una velocidad considerable en los servos que ya eran mucho más chicos y que no tenía nada que ver con aquellos de los primeros años de modelista. Este equipo se le instaló en primera instancia al Remolcador SANTANDER.

 Por aquellas épocas el Sr. Enrique
Noguera, ya nos vendió algunos equipos nuevos marca KRAFT, que los
instalamos a principios de la década de los 80´s en los ROBOTS de Televisa
usados en los programas de Fiebre del dos, Show de Cepillín y Olga Breeskin,
así como en el eficiente y perfeccionado Robot "JS", fabricado en México por
Javier y Joaquín Solana.
Estos equipos ya tenían en la parte superior un módulo muy grande
intercambiable, que era la frecuencia o cristal. Paralelamente en Alemania
había algunos equipos que manejaban una perilla de dial, para cambio de varios
canales. En esta época, en U.S.A. se podían encontrar más de una decena
de marcas de equipos, que ninguno era compatible con el otro, no como hoy
que casi todo les sirve a las dos o tres marcas líderes, como servos, speed
control, baterías, etc..
Por aquellas épocas el Sr. Enrique
Noguera, ya nos vendió algunos equipos nuevos marca KRAFT, que los
instalamos a principios de la década de los 80´s en los ROBOTS de Televisa
usados en los programas de Fiebre del dos, Show de Cepillín y Olga Breeskin,
así como en el eficiente y perfeccionado Robot "JS", fabricado en México por
Javier y Joaquín Solana.
Estos equipos ya tenían en la parte superior un módulo muy grande
intercambiable, que era la frecuencia o cristal. Paralelamente en Alemania
había algunos equipos que manejaban una perilla de dial, para cambio de varios
canales. En esta época, en U.S.A. se podían encontrar más de una decena
de marcas de equipos, que ninguno era compatible con el otro, no como hoy
que casi todo les sirve a las dos o tres marcas líderes, como servos, speed
control, baterías, etc..


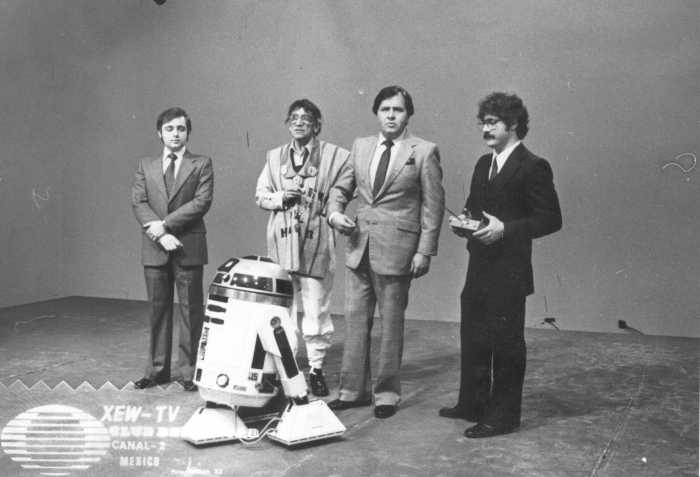

Robot JS, con un equipo EK Logictrol de 5 canales
Hoy los equipos son casi computadoras, podría decir que hay computadoras, que no tienen la tecnología de los radio controles. De hecho se ha llegado a un plano de tecnificación tal, que prácticamente se puede programar todo tipo de función en un transmisor de radio control, de modo que con un mismo equipo se puede volar un avión, cambiar de setup y volar un helicóptero, navegar una lancha, etc. etc..



 |
 |
Los equipos modernos más sencillos utilizan tonos de audiofrecuencia para manejar la portadora del transmisor (señal), la que no excede más de 0.5 de watt de potencia radiada y está se ubica dentro de las bandas de 27, 72, 75 y 50 Mhz. lo cual se asigna a cada área de operación de cada tipo de modelo, ya sea terrestre o aéreo. (Consultar CARTA de frecuencias). Además se les puede cambiar la frecuencia, con tan sólo remover el diminuto cristal con que operan. Primeramente las frecuencias eran representadas por colores y como hoy en día hay más frecuencias disponibles, se identifican por NUMERO DE CANAL; por tal razón hace unos años habían algunas frecuencias que hoy ya no existen, quedando intermedias entre las nuevas.
El receptor utilizado en este tipo de sistema, debe de contar con filtros entonados a las frecuencias de audio, las cuales al dejar pasar la frecuencia correspondiente, accionará un circuito el cual tendrá un actuador que mueve el timón, motor, etc. etc. y que se le conoce como SERVO, el cual tiene un circuito, un potenciómetro, un motor y un sistema de engranes, que es lo que proporciona la movilidad y fuerza.

Los equipos más utilizados, trabajan con sistemas digitales analógicos y los más sofisticados cuentan con microprocesadores de alta velocidad, en los cuales se aplican las últimas técnicas de miniaturización para que puedan ser introducidos en los pequeños modelos, además de ser muy benéfico para aminorar el peso en el caso de aviones y helicópteros. Por medio de ellos, se logra duplicar y superar maniobras de las naves reales, dada la precisión de movimiento.


Dichos transmisores cuentan con formadores de pulsos que pueden ser como compuertas en cadena a base de transistores o modernos MULTIPLEXERS, los cuales varían al tiempo de los pulsos formados mediante el movimiento de los bastones (Sticks) o volantes del equipo, que van conectados a potenciómetros, pudiendo de esta forma mover proporcionalmente y con precisión milimétrica, la dirección y avance del modelo.
En todos los casos, la emisión de ondas de estos transmisores debe de estar controlada a base de cristales y no exceder de 0.5 watt.

En el caso de equipos que utilizan sistema BINARIO, tanto el transmisor, como el receptor cuentan con microprocesadores ultraminiatura, los cuales generalmente operan en FM, PCM o PPM, siendo de doble conversión y sensibilidad suficiente para operar con toda seguridad a unos 1000 o 1500 metros de distancia. Inclusive muchos de los modelistas que experimentaron con radios en AM en submarinos y que desistieron por no poder maniobrar a más de 30 ó 40 Cmts. de profundidad, lograron alcanzar sus objetivos con la llegada de equipos en FM, PCM y PPM, ya que de este modo pueden sumergirlos a más de 2 metros de profundidad sin mayor problema de interferencia.
El helicóptero de radio control ha dado cabida a nuevos sistemas como el conocido FASE o MODO II, que se diferencia en que los mandos se encuentran invertidos en posición de operación; encontrándose incluso ya aviones que se operan en modo I y II. Con los transmisores programables, se puede de antemano introducir la operación en una fase o en otra y así operar con el mismo aparato un helicóptero y un avión, sin necesidad de hacer previos ajustes de laboratorio, sino que en el mismo campo de vuelo, con tan sólo introducirlo en la DATA del microprocesador o darle recall a la programación previa, ya tenemos el SETUP listo para usarse en determinado modelo.
 |
 |
| MODO I | MODO II |
Imágenes invocadas desde http://webpages.charter.net/rcfu/HelpsHints/RadioOps.html
El modelismo dinámico, además de ser apasionante por crear y construir uno mismo el modelo, se vuelve interesante desde el momento en que se puede "jugar" a placer tan sólo mover una palanca de un transmisor.
El modelista como tal se parece mucho al radio aficionado, además de entretenerse con el placer de construir un modelo y operarlo a distancia con el "MILAGRO" de lo que conocemos como RADIO. ¡¡ Si nos viera Guillermo Marconi, no daría crédito !!.
GLOSARIO DE TERMINOS y LIGAS REFERENTES AL TEMA DE RADIO
Glosario:
MODO
AM:
Amplitud Modulada (Modo de emisión)
MODO FM:
Frecuencia Modulada (Modo de emisión)
MODO PCM:
Pulse Code Modulation (Modo de emisión)
MODO PPM:
Pulse Position Modulation
(Modo de emisión)
Sistema anlógico digital:
A grandes rasgos se puede definir, como un sistema que tiene la particularidad de convertir señales digitales (BITS) a señales ANALOGICAS (PULSOS) o viceversa.
Ligas:
http://webpages.charter.net/rcfu/HelpsHints/RadioOps.html
© MODELISMO NAVAL DE J. SOLANA 2004